首页
试卷库
试题库
当前位置:
X题卡
>
所有题目
>
题目详情
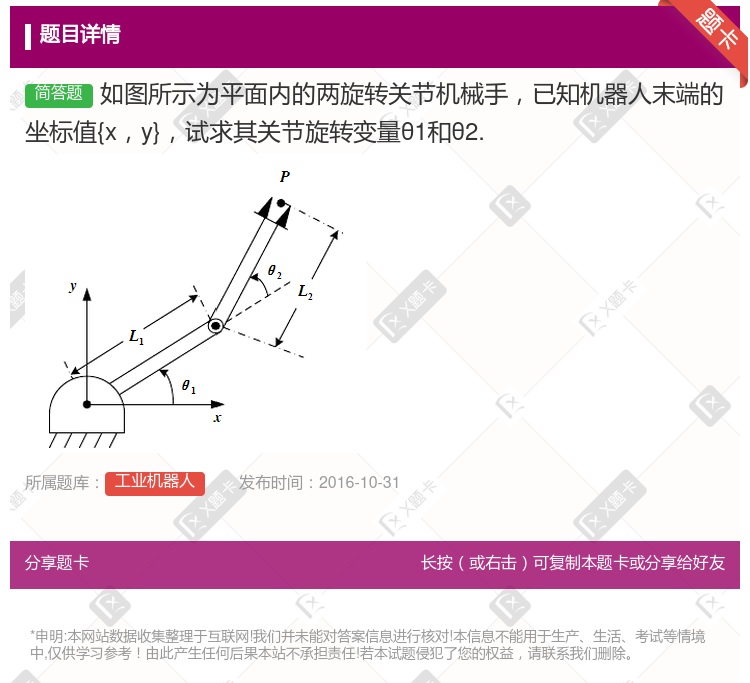
如图所示为平面内的两旋转关节机械手,已知机器人末端的坐标值{x,y},试求其关节旋转变量θ1和θ2.
查看本题答案
包含此试题的试卷
工业机器人《工业机器人》真题及答案
点击查看
你可能感兴趣的试题
工业机器人一般由组成
主机
操作机
控制系统
驱动系统
机械手
如图所示为具有三个旋转关节的3R机械手求末端机械手在基坐标系{x0y0}下的运动学方程
机械手是焊接机器人的执行结构它主要由组成
驱动器
传动机构
机器人臂
关节
机械手亦可称之为机器人
如图所示的三自由度机械手两个旋转关节加一个平移关节简称RPR机械手求末端机械手的运动学方程
在比较危险的岗位或被迫按机器的节奏连续生产过程使用机器人或机械手代替人来操作使工作条件不断改善
机械手是焊接机器人的执行结构它主要由等组成
驱动器
传动机构
机器人臂
关节
编码盘
电源
工作范围是指机器人或手腕中心所能到达的点的集合
机械手
B 、手臂末端
手臂
D 、行走部分
数控程序中刀具运动位置的坐标值的表现形式有
直角坐标值
极坐标值
绝对坐标值
增量坐标值
直线坐标值
旋转坐标值
机器人编程语言基本功能包括运算决策通信机械手运动工具指令及传 感器数据处理
如图所示的两自由度机械手手部沿固定坐标系在手上X0轴正向以1.0m/s的速度移动杆长l1=l2=0.
机器人系统结构通常由四个相互作用的部分组成机械手环境任务和控制器
地形图上地面点的平面坐标可以依据地形图方格网的确定
垂直坐标值
纵坐标值
横坐标值
坐标值
数控程序中刀具运动位置坐标值的表现形式有
直角坐标值
极坐标值
绝对坐标值
增量坐标值
直线坐标值
旋转坐标值
一套完整的弧焊机器人系统包括机器人机械手焊件夹持装置
焊接装置
机器人、焊接装置
控制系统
控制系统、焊接装置
热门试题
更多
干涉区信号设置有两种分别是和基于设备安全方面考虑现场使用的干涉区绝大多数都是绝对优先干涉区并尽可能的通过作业时序上错开的方法来实现节拍最优化
在机器人的正面作业与机器人保持以上的距离
机器人可以帮助人类做很多事情例如翻译机器人能够实现在任何时间场所对任何人和任何设备的多语言服务安保机器人中其杰出代表为排爆机器人你还知道其它机器人已经能够实现的服务项目吗请列举至少三个
智能中型足球机器人踢球机构有哪几种形式
1998年乐高教育推出的头脑风暴系列改变了世界的潮流和传统的科技教育.
机器人足球涉及的主要研究领域有哪些
机器人上常用的可以测量转速的传感器有和
正常联动生产时机器人示教编程器上安全模式不应该打到位置上
机器人发展的三个阶段
6自由度机器人有解析逆解的条件是机器人操作手的独立关节变量多于的运动自由度数
通常对机器人进行示教编程时要求最初程序点与最终程序点的位置可提高工作效率
齐次坐标[0010]T表示的内容是
用关节插补示教机器人轴时移动命令为
中国青少年机器人竞赛的比赛时间大概是
机器人能力的评价标准有哪些请至少写出五个
设定关节坐标系时机器人的SLURBT各轴运动
机器人的三种动作模式分为
研究制造仿人形机器人有何意义
机器人的基本组成部分有哪些
对机器人进行示教时作为示教人员必须事先接受过专门的培训才行.与示教作业人员一起进行作业的监护人员处在机器人可动范围外时可进行共同作业
机器人对外界产生作用相当于人的手和脚可称之为器官
如果机器人相邻两关节轴线相交则联接这两个关节的连杆长度为
对机器人进行示教时模式旋钮打到示教模式后在此模式中外部设备发出的启动信号
国际机器人奥林匹克竞赛的目的是什么
机器人的腕部轴为本体轴为
当前与信息技术的交互和融合又产生了网络机器人的名称这也说明了机器人所具有的创新活力
它可以侦测到单个或多个按钮压力机和报告回给nxt
你能例句几部关于机器人的电影吗至少五个
机器人系统大致由和等部分组成
机器人轨迹支持四种插补方式分别是插补插补插补插补插补命令分别是
热门题库
更多
工业机器人
机械工程测试技术
机械设计/机械优化设计
泵与泵站
泵和压缩机
工业制图
机械制图
机械振动学
数控技术与应用
数控机床电气控制
铸造工艺学
误差理论与数据处理
建筑物理
机电一体化系统设计
机电传动控制
机床夹具设计
 湘公网安备 43130202000226号
湘公网安备 43130202000226号